arduino_adxl345
1 使用硬件
ardunio adxl345 面包板 杜邦线
2 线路连接
| arduino | adxl345 |
|---|---|
| 3v3 | vcc |
| GND | GND |
| A4 | SDA |
| A5 | SCL |

3 arduino代码
#include <Wire.h>
#define DEVICE (0x53) //ADXL345 device address
#define TO_READ (6) //num of bytes we are going to read each time (two bytes for each axis)
byte buff[TO_READ] ; //6 bytes buffer for saving data read from the device
char str[512]; //string buffer to transform data before sending it to the serial port
int regAddress = 0x32; //first axis-acceleration-data register on the ADXL345
int x, y, z; //three axis acceleration data
double roll = 0.00, pitch = 0.00; //Roll & Pitch are the angles which rotate by the axis X and y
//in the sequence of R(x-y-z),more info visit
// https://www.dfrobot.com/wiki/index.php?title=How_to_Use_a_Three-Axis_Accelerometer_for_Tilt_Sensing#Introduction
void setup() {
Wire.begin(); // join i2c bus (address optional for master)
Serial.begin(9600); // start serial for output
//Turning on the ADXL345
writeTo(DEVICE, 0x2D, 0);
writeTo(DEVICE, 0x2D, 16);
writeTo(DEVICE, 0x2D, 8);
}
void loop() {
readFrom(DEVICE, regAddress, TO_READ, buff); //read the acceleration data from the ADXL345
//each axis reading comes in 10 bit resolution, ie 2 bytes. Least Significat Byte first!!
//thus we are converting both bytes in to one int
x = (((int)buff[1]) << 8) | buff[0];
y = (((int)buff[3])<< 8) | buff[2];
z = (((int)buff[5]) << 8) | buff[4];
//we send the x y z values as a string to the serial port
// Serial.print("The acceleration info of x, y, z are:");
// sprintf(str, "%d %d %d", x, y, z);
// Serial.print(str);
// Serial.write(10);
//Roll & Pitch calculate
RP_calculate();
// Serial.print("Roll:"); Serial.println( roll );
// Serial.print("Pitch:"); Serial.println( pitch );
// Serial.println("");
// Serial.print("Roll:"); Serial.println( roll );
// Serial.print("Pitch:"); Serial.println( pitch );
// Serial.println("");
char xyz[30]={0};
char x[6];
dtostrf(roll,1,2,x);
char y[6];
dtostrf(pitch,1,2,y);
char z[6];
dtostrf(0.0f,1,2,z);
strcat(xyz,"P=");
strcat(xyz,x);
strcat(xyz,",Y=");
strcat(xyz,y);
strcat(xyz,",R=");
strcat(xyz,z);
Serial.println(xyz);
//It appears that delay is needed in order not to clog the port
delay(50);
}
//---------------- Functions
//Writes val to address register on device
void writeTo(int device, byte address, byte val) {
Wire.beginTransmission(device); //start transmission to device
Wire.write(address); // send register address
Wire.write(val); // send value to write
Wire.endTransmission(); //end transmission
}
//reads num bytes starting from address register on device in to buff array
void readFrom(int device, byte address, int num, byte buff[]) {
Wire.beginTransmission(device); //start transmission to device
Wire.write(address); //sends address to read from
Wire.endTransmission(); //end transmission
Wire.beginTransmission(device); //start transmission to device
Wire.requestFrom(device, num); // request 6 bytes from device
int i = 0;
while(Wire.available()) //device may send less than requested (abnormal)
{
buff[i] = Wire.read(); // receive a byte
i++;
}
Wire.endTransmission(); //end transmission
}
//calculate the Roll&Pitch
void RP_calculate(){
double x_Buff = float(x);
double y_Buff = float(y);
double z_Buff = float(z);
roll = atan2(y_Buff , z_Buff) * 57.3;
pitch = atan2((- x_Buff) , sqrt(y_Buff * y_Buff + z_Buff * z_Buff)) * 57.3;
}
4 ue4 plugin
https://github.com/RVillani/UE4Duino
UE4Duino解压到项目文件夹plugins中

5 蓝图连接


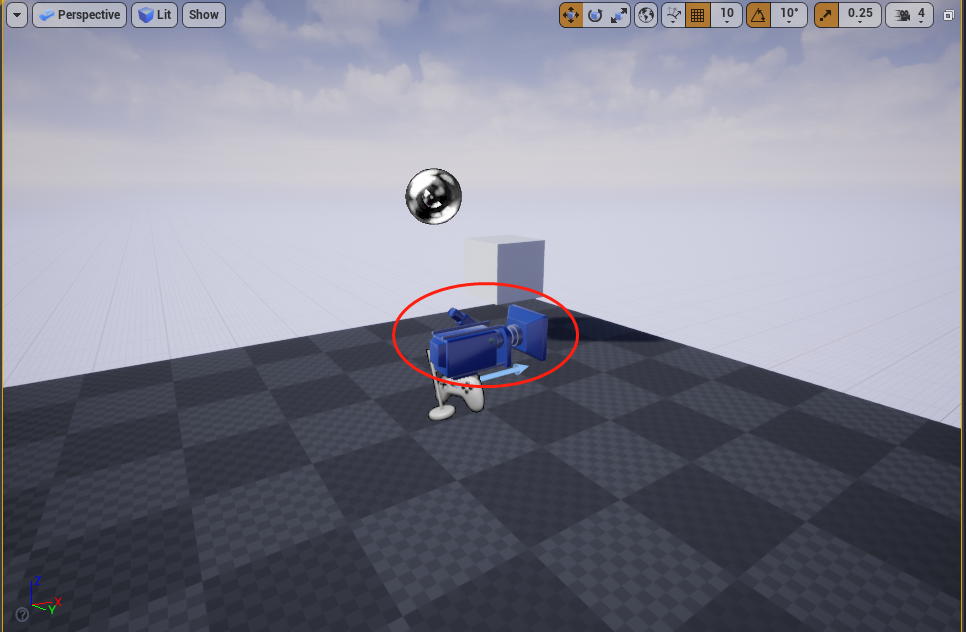
6 验证结果
摄影机跟着adxl345一起运动
7 总结
1 adxl345 传感器数据不稳定,产生抖动
2 缺少一个轴向
3 使用欧拉角产生极向量反转